What happens when engineering students decide that choosing between air and water is completely unnecessary? Aalborg University students created a drone prototype that can both fly and swim, using variable pitch propellers for smooth transitions. This hybrid drone represents a fascinating approach to multi-environment robotics, where a single device can operate effectively in two completely different mediums. The breakthrough lies in the clever engineering of variable pitch propellers that adapt their blade angles depending on whether they’re cutting through air or pushing through water. Instead of requiring separate aerial drones and underwater vehicles for different missions, this prototype suggests a future where one versatile machine handles both domains with impressive efficiency.
Designers: Aalborg University students
The project emerged from Andrei Copaci’s bachelor thesis work at Aalborg University, demonstrating how student innovation continues to push boundaries in drone technology. The 3D-printed hybrid drone can quickly transition between air and water thanks to variable pitch propellers. Unlike conventional drones that excel in one environment, this design prioritizes adaptability and seamless transitions. The engineering challenge centered on creating propellers that could generate sufficient thrust for flight while also providing effective propulsion underwater, where the physics of movement change dramatically. The solution involved developing propeller blades that automatically adjust their pitch angle based on the medium they encounter.
The Engineering Behind Variable Pitch Propellers
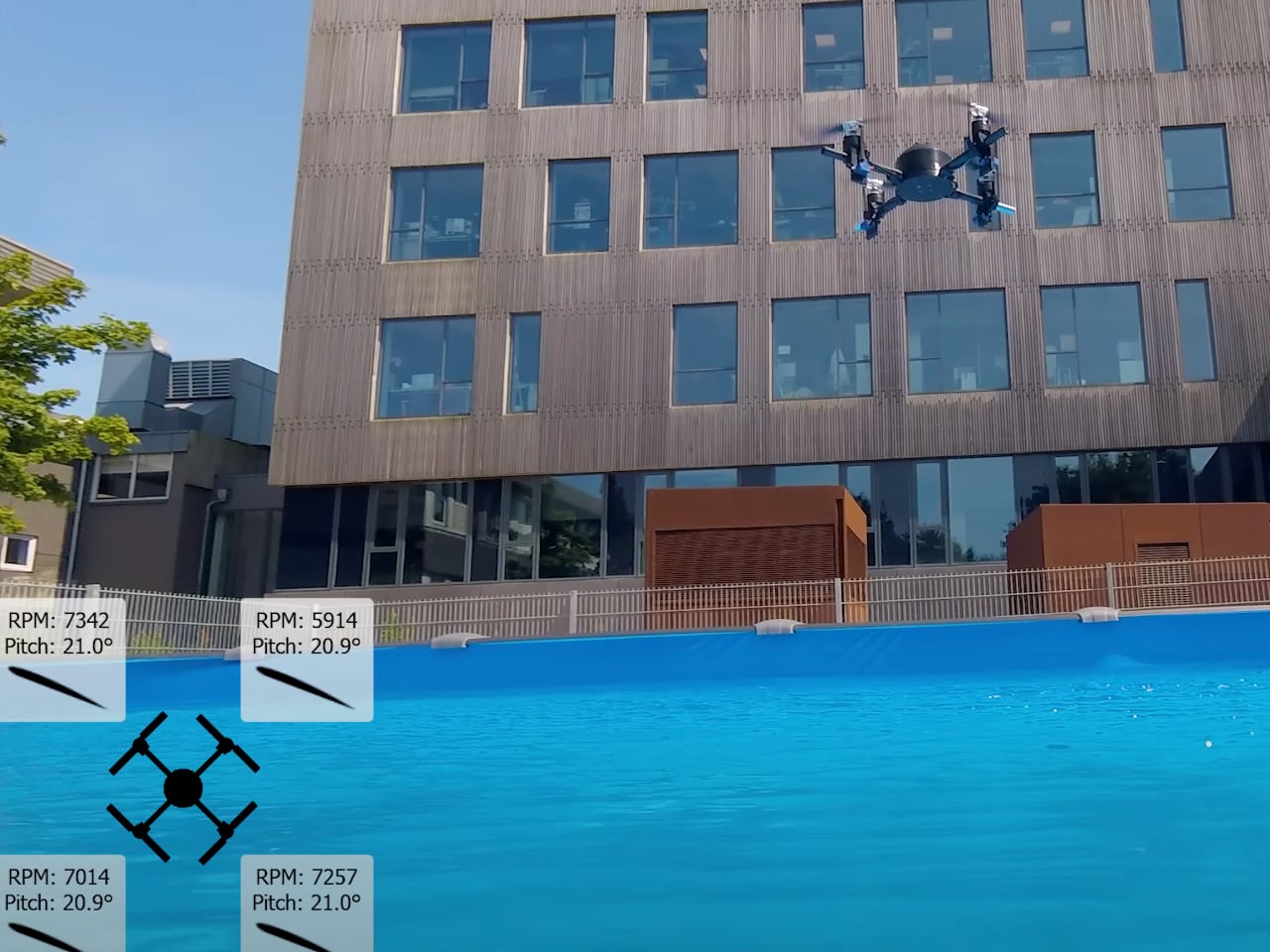
Variable pitch propellers serve as the heart of this hybrid drone’s unique capabilities, functioning like adjustable wings that optimize performance for different environments. At the heart of this drone’s unique ability is its variable pitch propeller system. Unlike standard propellers, these adjustable blades change their angle depending on whether the drone is flying or swimming. When operating in air, the propeller blades adopt a steeper pitch angle to generate the airflow and thrust necessary for sustained flight. This configuration maximizes the blade’s interaction with air molecules, creating the lift and forward momentum required for aerial maneuvers.
However, water presents entirely different challenges due to its density and resistance properties. Once underwater, the blades adjust to a lower angle. This reduces drag and allows the drone to maneuver efficiently through liquid. The transition happens automatically as the drone moves between environments, eliminating the need for manual adjustments or complex control systems. This automatic adaptation represents a significant engineering achievement, as it requires precise mechanical design and responsive control algorithms.
The propeller system must account for the vastly different fluid dynamics between air and water. Air offers minimal resistance but requires higher blade speeds and specific angles to generate lift. Water provides more resistance but allows for more efficient thrust generation at lower speeds with adjusted blade angles. The variable pitch mechanism bridges these opposing requirements through mechanical ingenuity.
The 3D-printed construction of the propellers adds another layer of innovation to the design approach. Using variable pitch propellers, 3D printed propeller blades, and custom flight control software, this drone smoothly translates between environments. This manufacturing method allows for rapid prototyping and precise customization of blade profiles, enabling the team to test different configurations and optimize performance for both air and water operations.
Seamless Environmental Transitions
The transition between air and water represents one of the most challenging aspects of amphibious drone design, requiring careful consideration of entry angles, speed management, and propulsion adjustments. Most hybrid vehicles struggle with this critical moment when they move from one medium to another, often experiencing performance degradation or control difficulties. However, this Aalborg University prototype demonstrates smooth environmental transitions that maintain operational effectiveness throughout the changeover process.
During the air-to-water transition, the drone must manage several complex factors simultaneously. The entry angle into water affects splash generation and initial underwater stability. Too steep an angle can cause the drone to dive uncontrollably, while too shallow an approach might result in skipping across the surface. The variable pitch propellers automatically adjust as they encounter water resistance, shifting from high-speed, low-angle air configuration to the lower-speed, higher-angle underwater setup.
The propulsion system’s adaptability becomes crucial during these transition moments. The Aalborg team’s work stands out for its effective use of variable pitch propellers and smooth environmental transitions, which are crucial for operational efficiency. Unlike fixed-pitch propellers that would struggle to maintain effectiveness across both mediums, the variable system optimizes thrust generation for each environment. This optimization prevents the power losses and control instabilities that typically plague multi-environment vehicles.
Water-to-air transitions present their own unique challenges, particularly regarding the additional weight from water retention and the need to generate sufficient lift for takeoff. The drone must overcome water’s surface tension while simultaneously reconfiguring its propellers for aerial operation. The seamless nature of these transitions suggests sophisticated control algorithms that coordinate propeller pitch changes with power management and flight control adjustments.
Applications and Future Potential
This hybrid drone technology opens up numerous practical applications across industries that currently require separate aerial and underwater vehicles. Search and rescue operations could benefit significantly from a single device capable of scanning large areas from the air before diving to investigate underwater locations. The ability to operate in two different environments using one device could replace the need for separate aerial drones and underwater vehicles. This could reduce costs and expand mission versatility.
Marine research represents another promising application area where hybrid drones could streamline data collection processes. Scientists studying coastal ecosystems, coral reefs, or underwater geological formations currently need multiple specialized vehicles to gather comprehensive data. A hybrid drone could conduct aerial surveys to map large areas, then dive to specific points of interest for detailed underwater investigation, all within a single mission profile.
Environmental monitoring applications could leverage the drone’s dual capabilities for comprehensive ecosystem assessment. Coastal pollution tracking, marine life observation, and water quality monitoring would benefit from devices that can seamlessly move between surface and subsurface environments. The cost reduction from using one versatile vehicle instead of multiple specialized units makes such monitoring programs more accessible to smaller research organizations and environmental agencies.
Infrastructure inspection presents another compelling use case, particularly for bridges, offshore platforms, and coastal installations. Previous efforts at creating similar air-water drones have existed, including prototypes developed in the United States and China. However, the Aalborg approach demonstrates practical improvements in transition smoothness and propeller efficiency that could make such applications more viable for commercial deployment.
The prototype’s current limitations suggest areas for future development, including extended battery life, improved waterproofing, and enhanced payload capacity. As these technical challenges are addressed, hybrid drones could become standard tools for industries requiring multi-environment capabilities.
Impact on Drone Design Philosophy
The success of this hybrid drone challenges conventional thinking about specialization versus versatility in unmanned vehicle design. Traditional engineering wisdom often favors specialized tools optimized for specific environments, arguing that jack-of-all-trades devices compromise performance in each domain. However, this project demonstrates that thoughtful engineering can create versatile systems without significant performance penalties in either operating environment.
The variable pitch propeller concept could influence broader drone design approaches beyond hybrid applications. Conventional aerial drones might benefit from propeller systems that adjust to different flight conditions, weather patterns, or payload configurations. The automatic adaptation mechanism developed for this hybrid system could enhance efficiency and performance across various single-environment applications as well.
While the current project is at the prototype stage, it paves the way for future developments in multipurpose drones that can move easily between air and water. Such innovations promise to expand the capabilities of unmanned vehicles and improve the collection of data and performance in complex operation areas.
The post This Hybrid Drone Seamlessly Transitions from Air to Water Using Variable Pitch Propellers first appeared on Yanko Design.